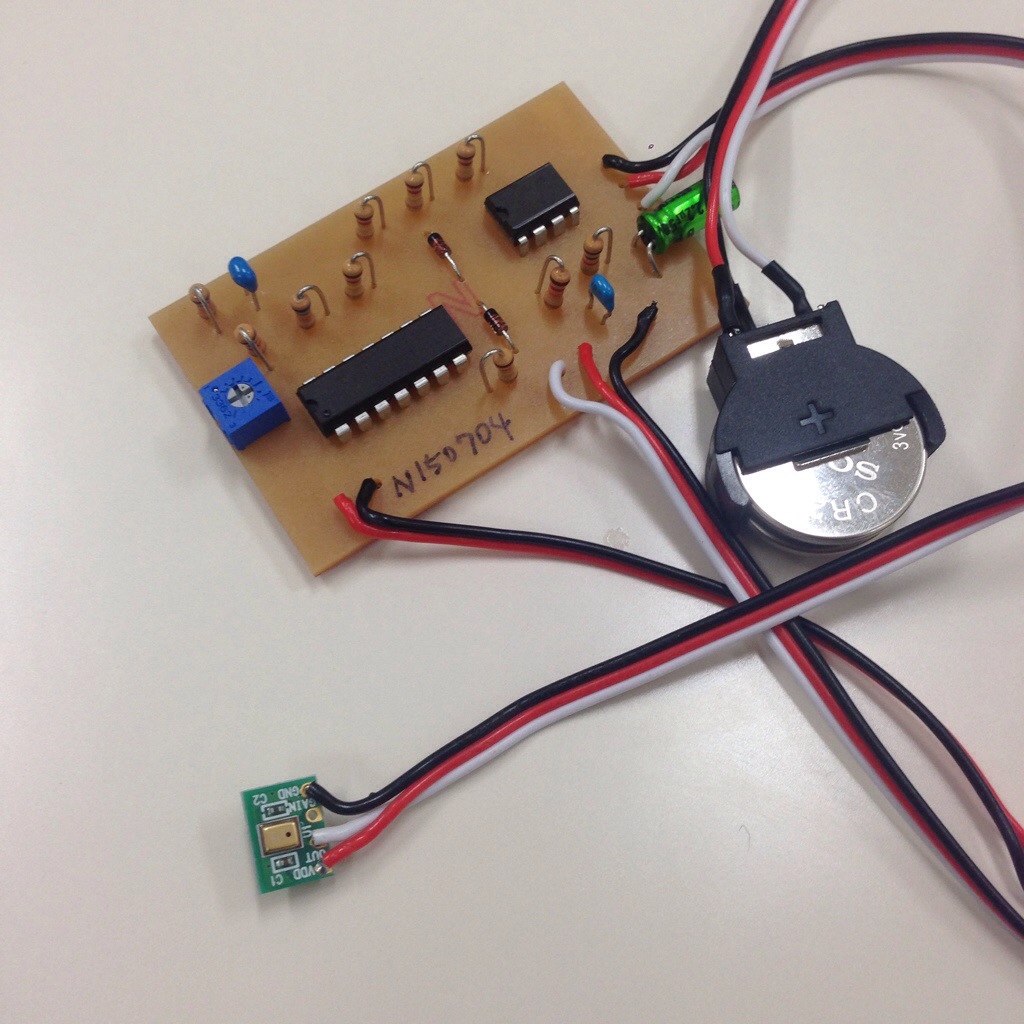
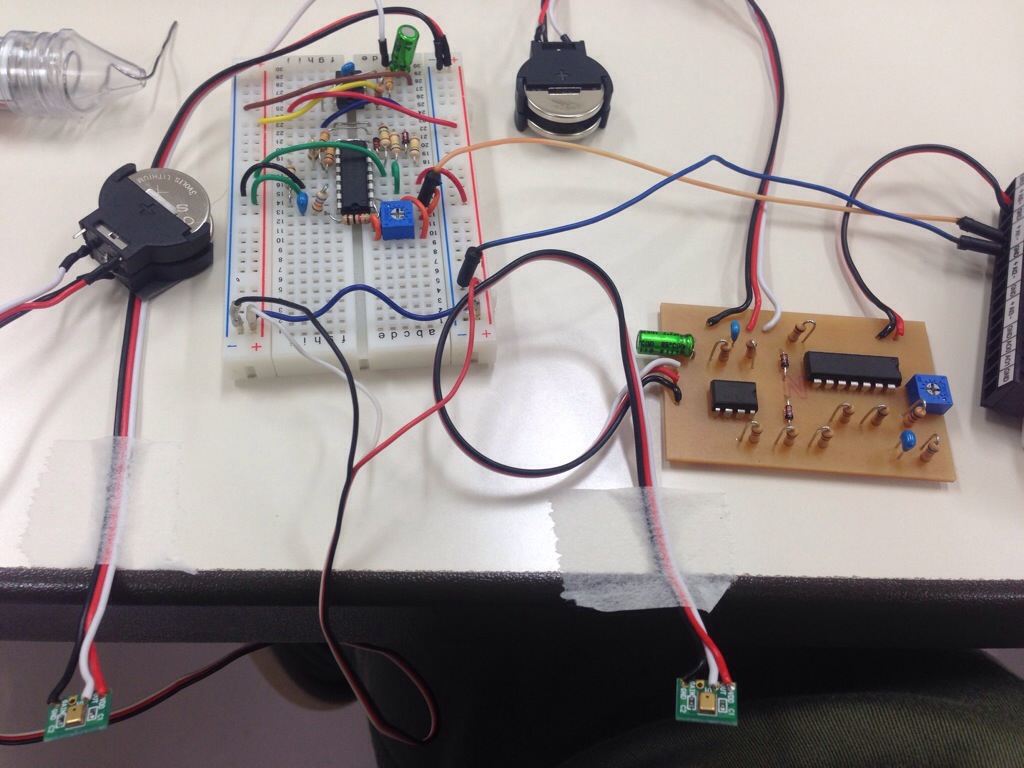
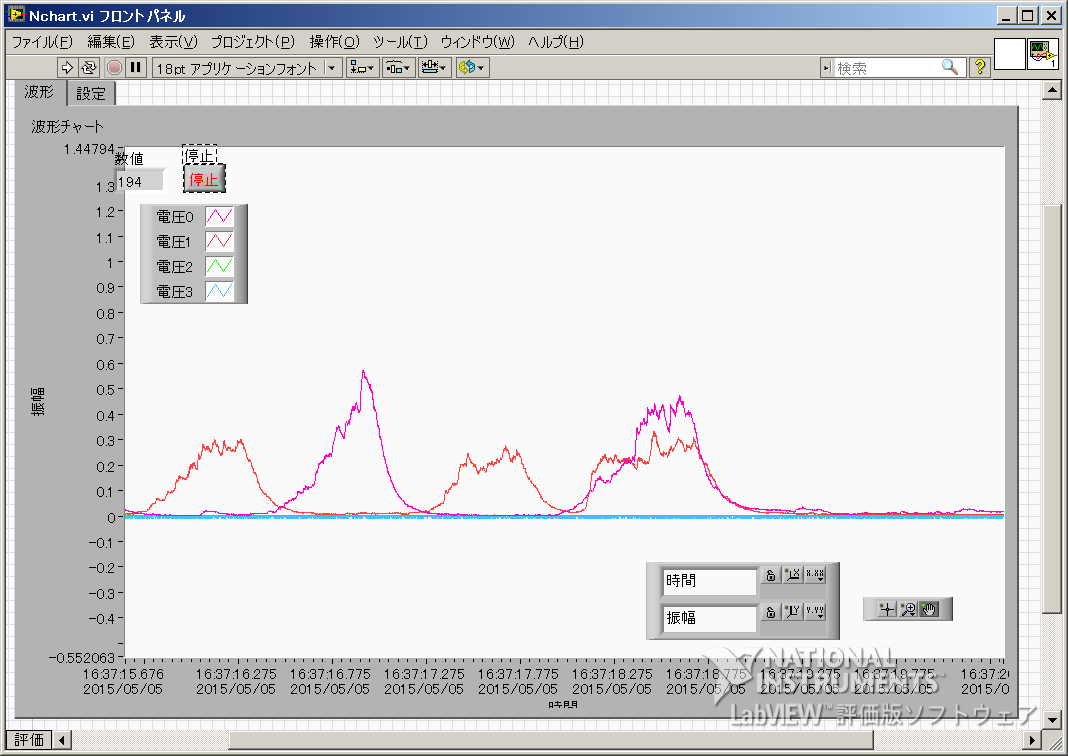
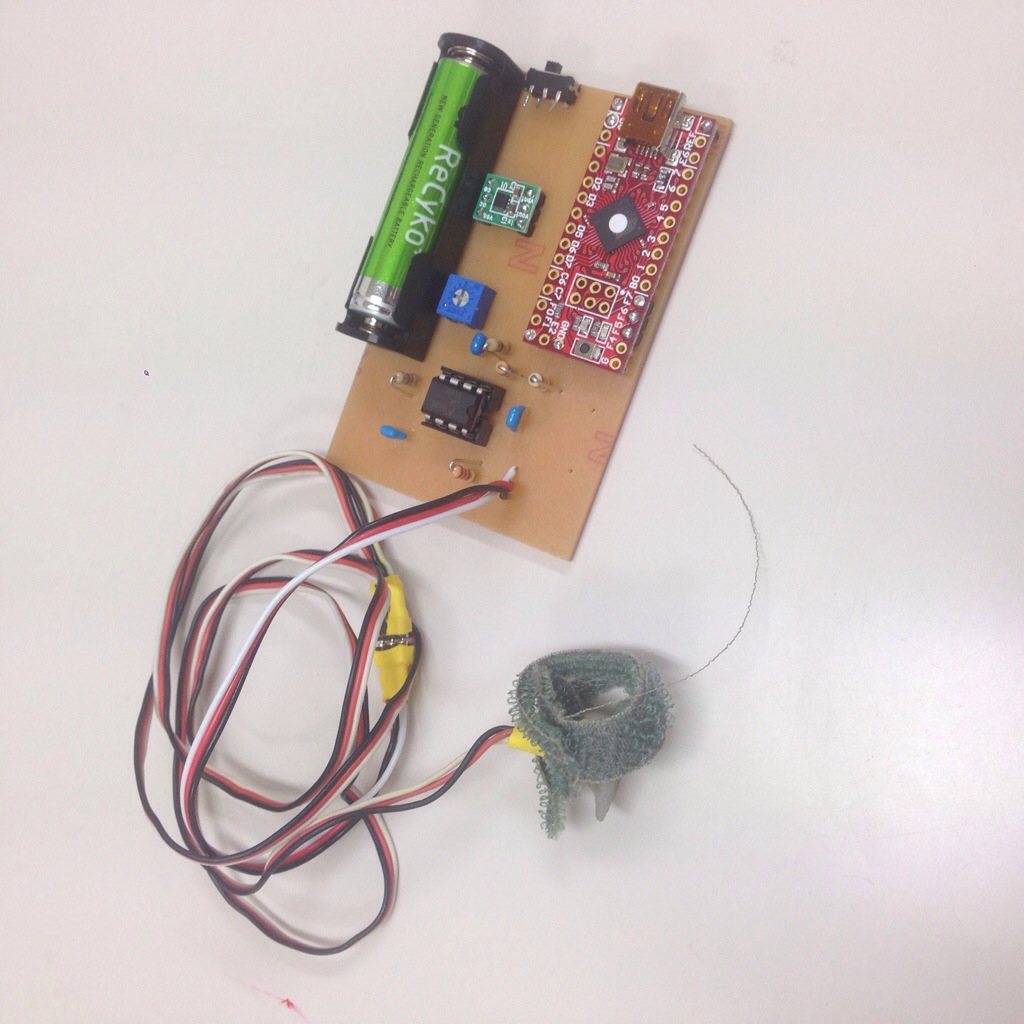
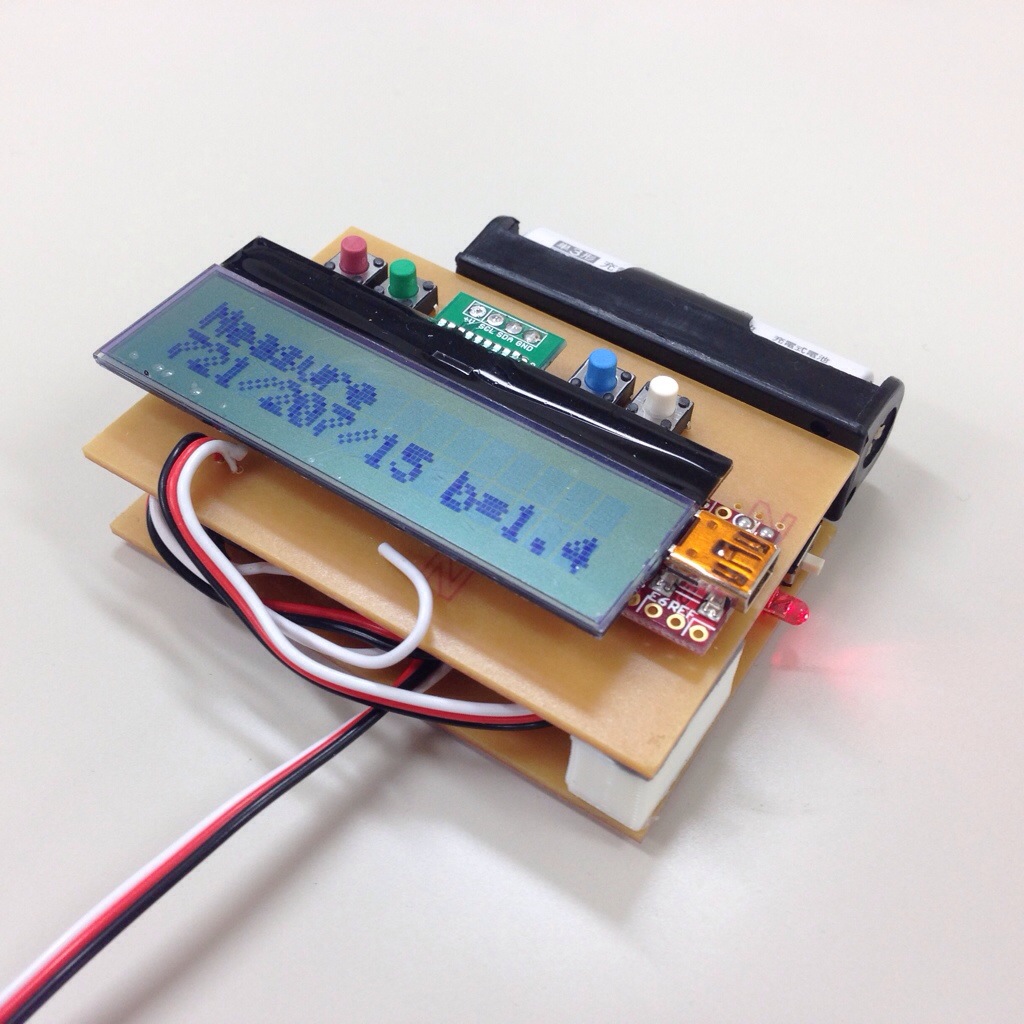
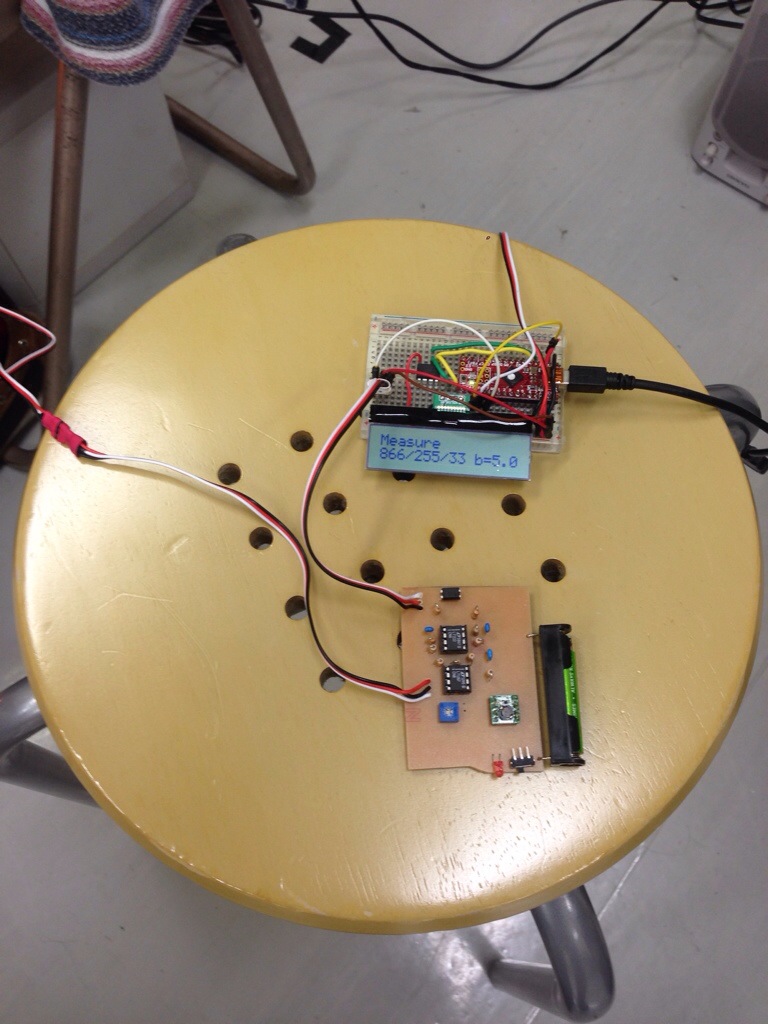
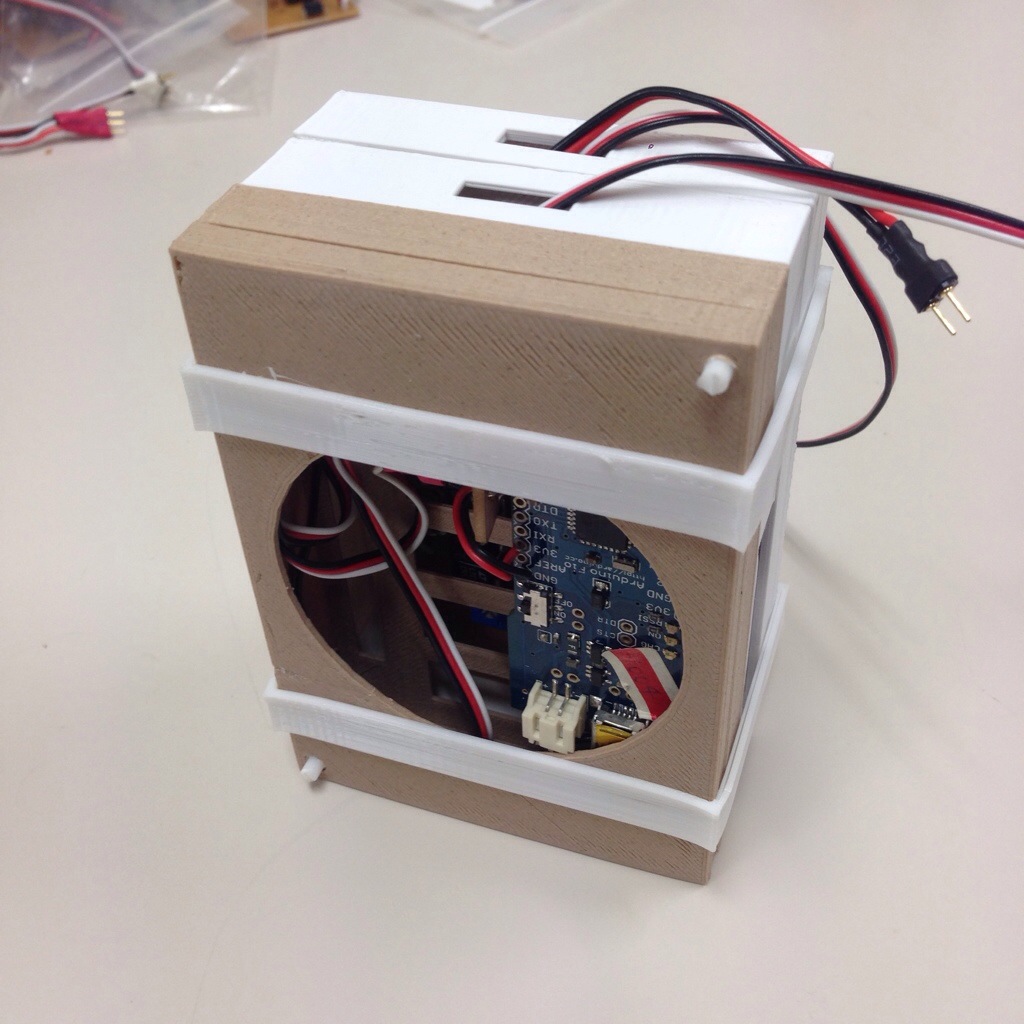
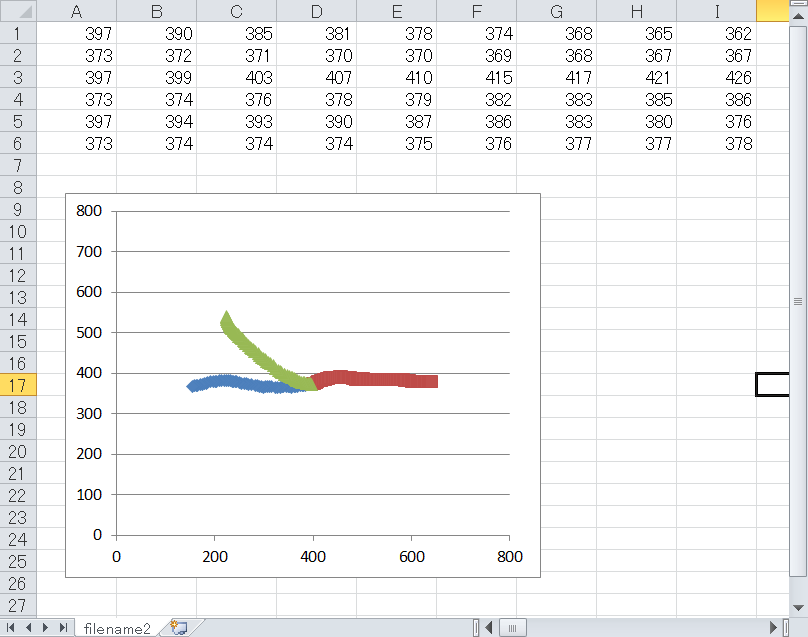
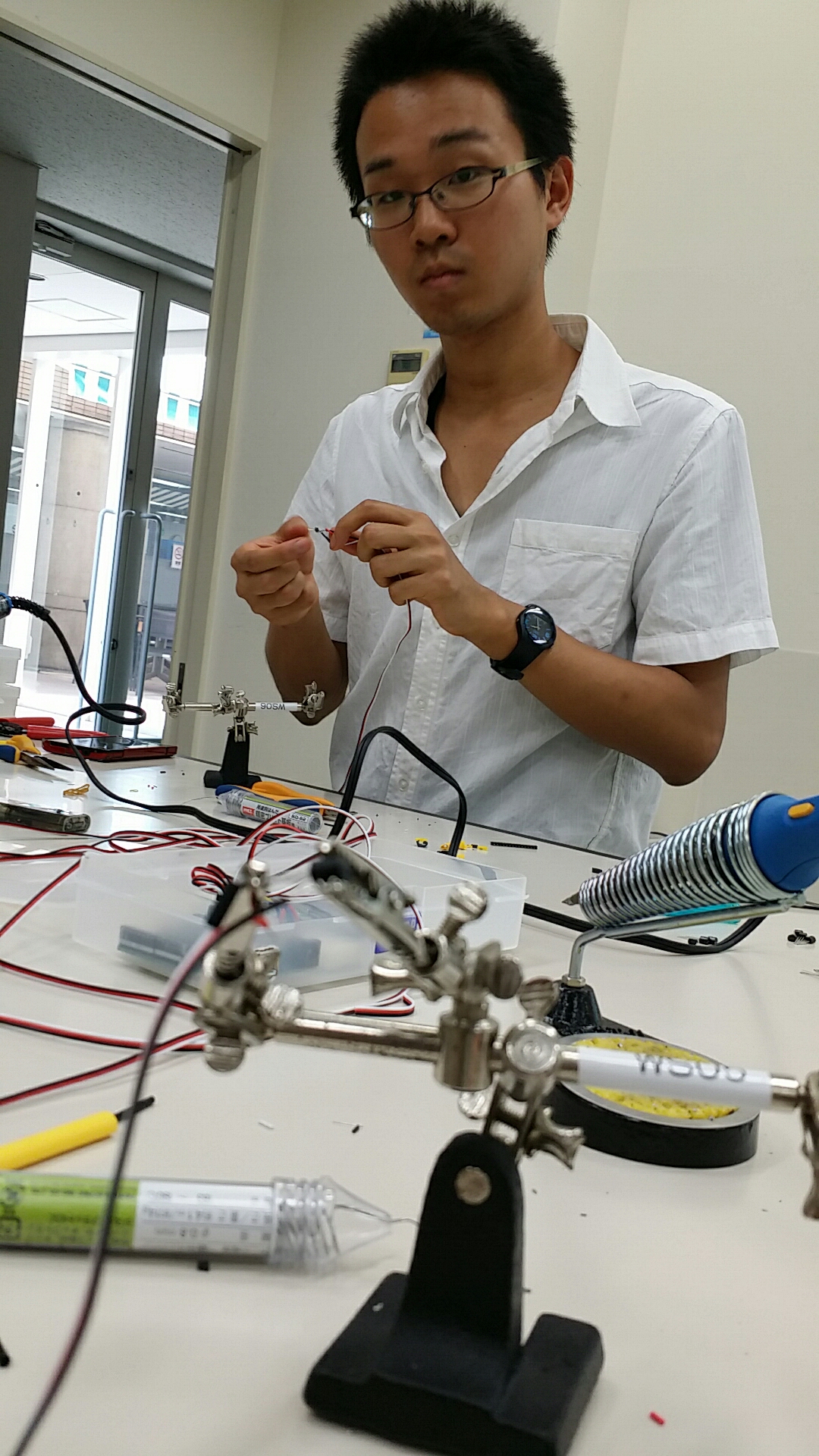
今回の日本心理学会では、「自作計測器で学ぶ精神生理学」というチュートリアルワークショップを開催します。前半は、ポータブル皮膚温計で、自己紹介時の皮膚温変化を視覚化します。後半は、ポータブル心拍計を使って、タングラム課題中の心拍ゆらぎ(RMSSD)を観測します。で、ポータブル心拍計をチェックしていたのですが、液晶が半分映らないものや、電源のハンダがとれて接触不良になってしまってるものなど、いろいろな故障が見受けられました。

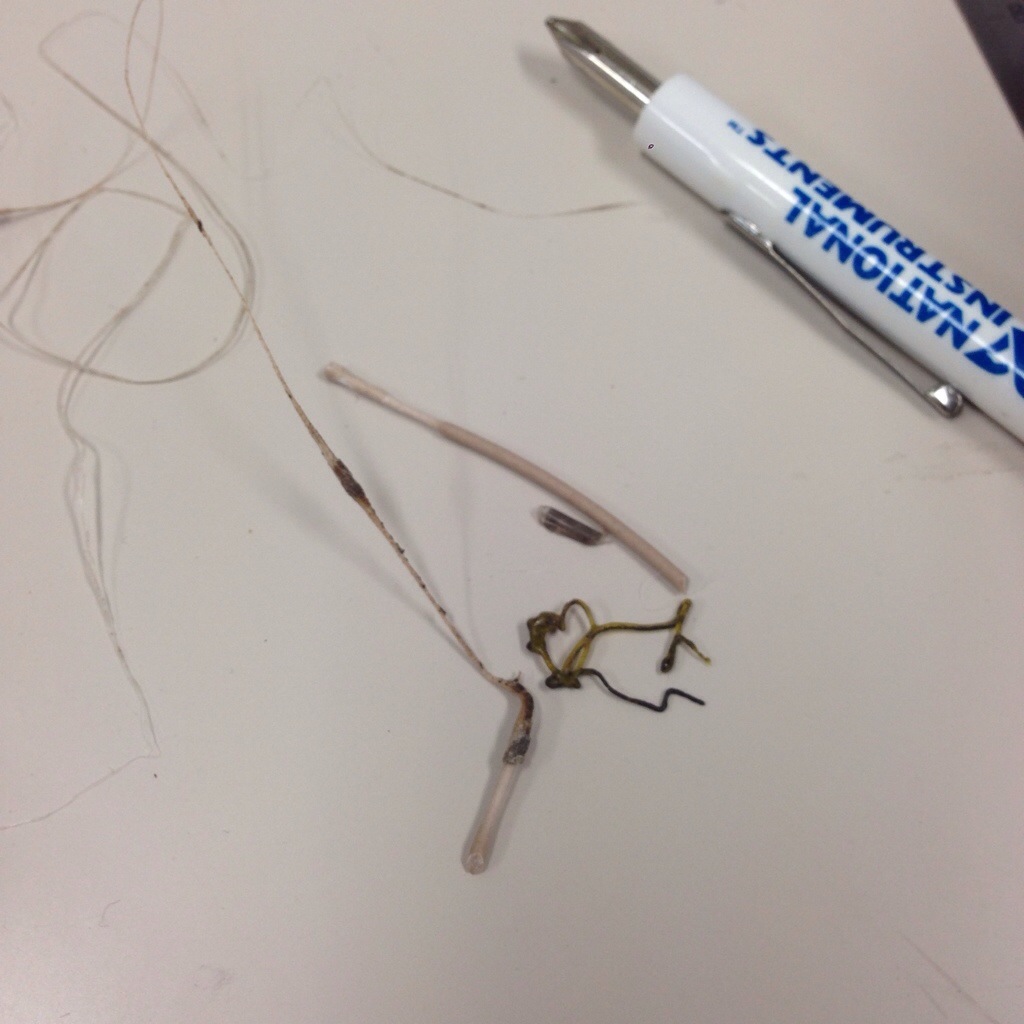
ケーブルも、かなり接触が不安定なものがあり、中身を確認すると、どこかで見たようなヒドイ状態のものがあったので、これも治しました。でも、全部で10台あるはずが、6台しかないんですよね。あとは、一台はBF機能を追加して福島が専有してて、もう一台は平良さんの手元にあるはず・・・、もう2台は??心当たりがあるかたは教えて下さい。まぁ作ればいいんですが、作るのが面倒くさくて。



















{kind=link}